ros_control
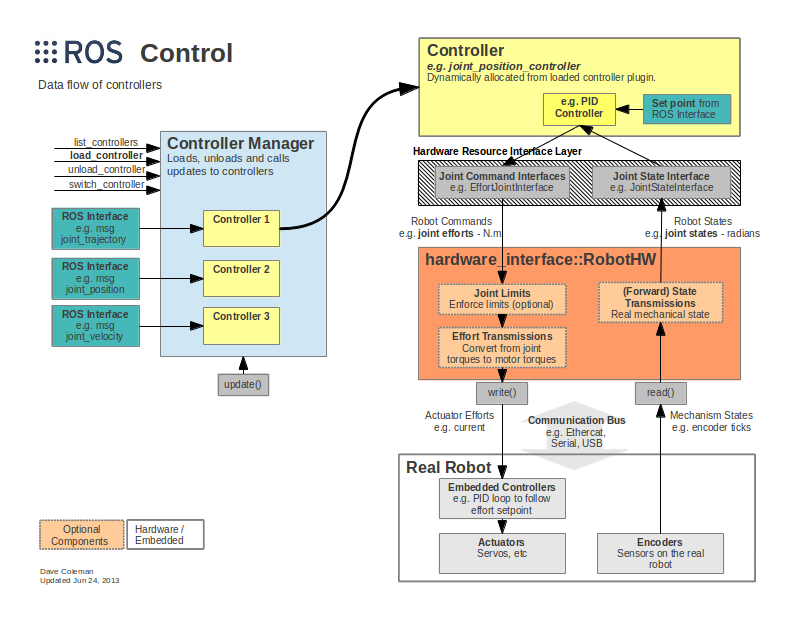
老生常谈的一张框架图了,
Controller和HW交流
- joint_state_controller - 将注册到 hardware_interface::JointStateInterface 的所有资源的状态发布到类型为 sensor_msgs/JointState 的主题。
- joint_state_controller
- position_controllers - 命令硬件接口的所需位置。
- joint_position_controller - 接收位置输入并发送位置输出,只需将输入与forward_command_controller一起传输即可。
- joint_group_position_controller - 一次设置多个关节位置。
- velocity_controllers - 向硬件接口命令所需的速度。
- joint_position_controller - 使用 PID 控制器接收位置输入并发送速度输出。
- joint_velocity_controller - 接收速度输入并发送速度输出,只需将输入与forward_command_controller一起传输即可。
- joint_group_velocity_controller - 一次设置多个关节速度。
- effort_controllers - 命令所需的力(力/扭矩)到硬件接口。
- joint_position_controller - 使用 PID 控制器接收位置输入并发送努力输出。
- joint_group_position_controller - 一次设置多个关节位置。
- joint_velocity_controller - 使用 PID 控制器接收速度输入并发送努力输出。
- joint_effort_controller - 接收工作量输入并发送工作量输出,只需使用forward_command_controller传输输入。
- joint_group_effort_controller - 同时设置多个共同努力。
- joint_trajectory_controllers - 用于样板整个轨迹的额外功能。查看源文件,了解joint_trajectory_controller如何与position_controller、velocity_controller等一起命名。
- position_controller
- velocity_controller
- effort_controller
- position_velocity_controller
- position_velocity_acceleration_controller
上述为controller list,需要利用他们与HW交流,下面是硬件的接口
ROS控制将硬件接口与上述ROS控制器之一结合使用,以向硬件发送和接收命令。
联合命令接口 - 支持指挥关节阵列的硬件接口。请注意,这些命令可以具有任何语义含义,只要它们每个命令都可以由单个双精度表示,它们不一定是 effort 命令。若要指定此命令的含义,请参阅派生类:
关节状态接口 - 支持读取命名关节数组状态的硬件接口,每个命名关节都有一定的位置、速度和力(力或扭矩)。
执行器状态接口 - 支持读取命名执行器数组状态的硬件接口,每个执行器都有一定的位置、速度和力(力或扭矩)。
执行器命令接口
努力执行器接口
速度执行器接口
位置执行器接口
力-扭矩传感器接口
IMU 传感器接口
WSL2连接串口完成Robot类,实现read,write
一上来我就蒙了,怎么 <termios.h> 这哥们include不上的?
这么说是POSIX终端控制wsl是没了?
搞了很久,如同傻子般,其实自己之前就搞过usbip这个鬼东西了,就卡在没给串口权限了QAQ。
在wsl2要实现串口,可以用USBIPD-WIN
(234条消息) WSL2下的usb串口设备使用_MagicKingC的博客-CSDN博客_wsl2 串口
WSL2不能直接用串口,需要USBIPD-WIN 项目为 WSL 2 提供 USB 设备支持。
在windows里,下载usbipd Releases · dorssel/usbipd-win (github.com)
WSL2里,下载工具包
sudo apt install linux-tools-5.4.0-77-generic hwdata
sudo update-alternatives --install /usr/local/bin/usbip usbip /usr/lib/linux-tools/5.4.0-77-generic/usbip 20
设备连接
windows
在powershell里操作,列出所有设备
usbipd wsl list
usbipd wsl attach --busid 设备的busid号
WSL2
lsusb
查看串口设备有没有被列出
给串口权限
sudo chmod a+rw /dev/ttyUSB0
完成
在usbipd wsl attach --busid 这个后面加上这个,能自动attach
--auto-attach